 |
【字体:小 大】 |
| 无传感器的直流无刷电机控制器ML4425及其应用 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| http://www.dykf.com 2008/2/21 电源开发网 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
无传感器的直流无刷电机控制器ML4425及其应用 刘胜利,刘宁宁 (深圳中电公司电力所,广东深圳518042) 1 引言 ML4425脉宽调制控制器具有为起动和控制△接或Y接无刷直流(BLDC)电机速度所需要的全部功能,并且不用霍尔传感器。从电机绕组传感的反电势电压信号,利用锁相环(PLL)即可确定正确的换向时序,这一获专利的传感技术可以在宽范围内使三相无刷电机换向,并且对PWM噪声和电机缓冲电路的干扰不敏感。 ML4425利用恒定的停歇时间PWM控制环路,限制电机的工作电流。其速度环是由机载放大器控制。ML4425电路能保证没有穿透电流干扰而直接驱动外部功率MOSFET。起动程序的定时由三个可供选择的定时电容器来确定。这就使大范围变化的电机和负载能够处于最佳状态。 ML4425的主要性能如下: 1)可独立工作; 2)通过IC控制电机的起动和停止; 3)机载起动时序为校准→斜升→设定速度; 4)获专利的反电势换向技术为最短的“自转”时间提供了无抖动转矩; 5)具有机载速度控制环; 6)用于换向的锁相环PLL可对PWM产生的尖峰脉冲噪声的抗干扰创造条件,其作用与噪声传感过零技术相似; 7)PWM控制可得到最高效率; 8)MOSFET直接驱动12V电机;驱动高压电机需要用IR、IXYS、Harris、PowerIntegration、Siliconix等公司生产的IC缓冲器。 2 ML4425的结构与参数 2.1 ML4425的结构 ML4425有二种封装型式,其引脚排列如图1所示。它们的内部功能方框图如图2(以28引脚为例)所示。
(a)窄形28脚
(b)方形32脚 图1 ML4425集成电路两种封装型式
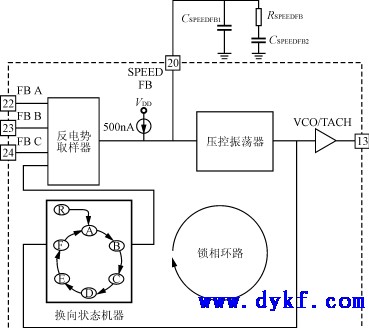
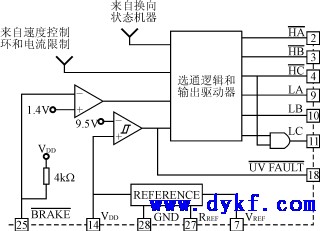
图2 ML4425电机控制器内部功能框图 ML4425各引脚功能如下(以28引脚为例,脚号后括号内数字为32脚的脚号)。 脚1(30)ISENSE:电机的电流传感输入端。当ISENSE超过0.2×ILIMIT时,三路输出驱动器LA、LB、LC均被关闭一个固定时间(由CIOS电容量确定)。 脚2(31)HA:A相高边开关的有源低输出驱动器。 脚3(32)HB:B相高边开关的有源低输出驱动器。 脚4(1)HC:C相高边开关的有源低输出驱动器。 脚5(3)SPEED COMP:是速度控制环的补偿端,它由接在SPEED COMP脚与地端之间的串联的电阻器和电容器来设置。 脚6(4)CT:一只电容器接CT与地之间,可设定PWM振荡器频率。 脚7(5)VREF:6.9V基准参考电压输出。 脚8(6)SPEED SET:速度控制环输入端,变化范围从0(停机)到VREF(最大速度)。 脚9(7)LA:A相低边开关的有源高输出驱动器。 脚10(8)LB:B相低边开关的有源高输出驱动器。 脚11(9)LC:C相低边开关的有源高输出驱动器。 脚12(10)ILIMIT:该脚电压把ISENSE的门限电压设定在0.2×ILIMIT,该脚空悬不接,自动选IC内部的置位门限电平。 脚13(11)VCO/TACH:该脚的TTL输出电平对应于时钟信号用在换向状态机器。当反电势传感电路跟踪转子位置时,其输出频率与电机速度成比例。 脚14(12)VDD:12V电源电压输入端。 脚15(15)CVCO:该脚对地接一只电容器,可设定压控振荡器(VCO)的压-频比率。 脚16(16)RVCO:该脚对地接一只电阻器,可设置一与VCO输入电压成比例的电流。 脚17(17)CAT:该脚对地接一只电容器,可设定控制器保持在校准状态的时间。 脚18(18)UV FAULT:当VDD降低到UVLO欠压锁定门限电平时,该脚输出电平变为最低,表示所有的输出驱动器均已失效。 脚19(19)CRT:该脚对地接一只电容器,可设定控制器保持在斜升状态的时间。 脚20(20)SPEED FB:反电势取样电路的输出端和VCO的输入端,一个RC网络接在SPEED FB端,可设置对锁相环路(PLL)的补偿,该PLL电路由反电势取样电路、VCO和换向状态机器构成。 脚21(21)CRR:当控制器处于斜升状态时,在CRR与SPEED FB两端之间接一只电容器,可设定电机的斜升速率(即加速度)。 脚22(22)FB-A:通过在该脚上的传感反电势的电阻分压器,监视A相的电机反馈电压。 脚23(23)FB-B:通过在该脚上的传感反电势的电阻分压器,监视B相的电机反馈电压。 脚24(24)FB-C:通过在该脚上的传感反电势的电阻分压器,监视C相的电机反馈电压。 脚25(25)BRAKE:一个逻辑低电平输入使电机制动,它是通过关断高边输出驱动器和接通低边输出驱动器来实现的。 脚26(26)CIOS:该脚对地接一只电容器,可设置在ISENSE超过它的门限电平之后,低边输出驱动器仍然保持关断的时间。 脚27(27)RREF:该脚对地接一只137kΩ的电阻器,可设置与VREF成比例的电流,它用于为IC内部设定所有的偏置电流(除VCO之外)。 脚28(28)GND:信号地与功率地端。 2.2 ML4425的参数 2.2.1 ML4425极限值(绝对最大额定值) 权限值是指器件的应力额定值,一旦超过可能导致器件永久性损坏,它们并非器件的工作参数。 电源电压(脚14)VDD:14V; 逻辑输入(SPEED FB,BRAKE):(GND-0.3)~7V; 所有其它输入和输出:(GND-0.3)~(VDD+0.3); 输出电流(LA、LB、LC、HA、HB、HC):±50mA; 结温:150℃; 储存温度:-65℃~150℃; 引脚焊接温度:260℃(10s内)。 2.2.2 ML4425的运行条件 温度范围 ML4425GX 0~70℃; ML4425IX -40~85℃。 VDD 10.8~13.2V。 2.2.3 ML4425的电特性 ML4425的电气参数如表1所列。 表1 ML4425电气参数 除非另有说明,通常VDD=12V±10%,RSENSE=1Ω,CVCO=10nF,CIOS=100pF,RREF=137kΩ,TA=工作温度(注1,注2)。
注1:限制的保证是作100%测量,取样或在最坏测试条件下调节。 注2:关于状态的解释参见图4和表2。 注3:脚BRAKE和脚UV FAULT在IC内部均有一只4kΩ电阻器接到基准电压。 3 ML4425的功能原理 ML4425为无传感器型速度控制的三相BLDC直流无刷电动机提供了全部电路。控制器的功能包括:起动电路、反电动势换向控制、脉宽调制PWM的速度控制、固定的停歇时间电流限制、制动、欠压保护。 起动电路把电机校准在已知位置,随后斜升电机速度产生一个反电势信号。通过构成的一个锁相环路,反电势取样电路可控制换向时间。换向控制电路又输出一个速度反馈(SPEEDFB)信号,用于速度控制回路。速度控制回路由一个误差放大器和PWM比较器组成,它产生一个PWM占空比调节速度。电机电流由一个固定停歇时间PWM关闭比较器来限制,它受控于外部传感电阻器。 换向控制、PWM速度控制和电流限制共同结合,产生输出驱动器信号。六路输出驱动器用于提供选通信号给外部三相桥式功率级,按直流无刷电机的电压和电流要求进行测量。其它功能包括:制动功能和欠压保护电路。一旦ML4425供电VDD变为低压时,可关闭输出驱动器。 3.1 元件的选择 选择IC外部元件需要根据电机的电气参数和机械参数作一些计算。下面列出这些计算需要的电机参数: 直流电机电源电压 VMOTOR(V); 最大工作电流 IMAX(A); 磁极的数目 N; 反电势常数 Ke(V-S/Rad); 电机的转矩常数 Kt(N·m/A)(Kt=Ke,单位SI); 最大运行速度 RPMMAX(r/min); 电机和负载的转动惯量 J(kg·m2); 电机和负载的粘滞阻尼因数 ξ。 如果不知道上述一个值或几个值,仍然可能得到合适的ML4425外部元件数值,但需要做一些实验来确定其最佳值。除非另有特殊说明,所有的数量单位都用SI。下面的公式应考虑最佳起始点。所有计算的电容器和电阻器,都应采用最接近标准值的第一个近似值作为选择。 3.2 电源和基准参考电压 电源电压VDD通常为12V±10%。应尽量靠近VDD端对地接一只100nF旁路电容器。提供6.9V电压基准输出VREF,来设置ML4425的速度指令和电流限制。需要在RREF端对地接一只137kΩ电阻器,为IC内部功能建立一个基准电流。 3.3 输出驱动器 输出驱动器LA、LB、LC和HA、HB、HC为三相桥式功率级提供图腾柱式输出驱动信号。ML4425中所有的控制功能,都传送到这些引脚输出。其中LA、LB、LC为三相功率级的A、B、C相提供低边驱动信号,并以12V为有效高电平信号。而HA、HB、HC为A、B、C相提供高边驱动信号,并以12V为有效低电平信号。 3.4 功率级的电流限制 电流传感电阻器RSENSE如图3所示,它可调节功率级和直流无刷电机的最大电流。如果RSENSE两端的电压超过电流限制门限电平,则可通过把输出驱动器LA、LB和LC关断一定的时间,来实现电流的调节。
图3 在三相12V功率级中使用传感电阻器RSENSE 1)ILIMIT 在ILIMIT脚上的电压设定了电流限制门限电平。 ML4425内部有一个从VREF接地的分压器,它设定了一个23V的误差电流限制门限电平,见图4。以VREF为基准的外部分压器,可用于拒绝错误的ILIMIT设置。外部分压器的电流至少应比内部分压器电流大10倍。
图4 电流传感电路 2)RSENSE RSENSE的功能是提供一个与电机电流成正比的电压,以设定电流限制跳闸断开点。RSENSE两端错误跳闸电压是460mV,它由内部ILIMIT分压比来设定。电流传感电阻器应是低电感量的电阻器,如碳膜成分组成。对毫欧姆范围的电阻器,用导线卷绕的电阻应具有低值电感。 3)ISENSE滤波器 接ISENSE脚的RC低通滤波器与电流传感信号相串联,见图4。设置该滤波器是为去除二极管反向恢复时的穿透电流。该电流在电流传感信号的前沿引起一个电压尖峰,可能会误触发电流限制电路。在滤波器前、后的电流传感电压波形见图5。该电路推荐的初值为R=1kΩ、C=300pF,这就给出了时间常数330ns,它将滤除更短持续时间里的输出尖峰。也可增大电容器到C=2.2nF,但时间常数不应超过几个微秒。
(a)无滤波时 (b)经滤波后 图5 电流传感电阻器波形 4)CIOS 当ISENSE超过0.2×ILIMIT时,电流限制一次性触发功能起作用,它将在一个固定的时间(tOFF)内关断LA、LB和LC。tOFF由接到CIOS脚的电容设定。通常CIOS设置一个等于或小于脉宽调制周期的固定的停歇时间。当PWM的频率为25kHz时,PWM的周期为40μs,则tOFF应在20μs~40μs之间。对tOFF的较低限制,是由功率级的最小导通时间决定的,故安全的近似值是5μs或更小些。求解CIOS电容量的方程为: CIOS=(tOFF×50μA)24V=100pF(1) 3.5 换向控制 三相直流无刷电机需要电子换向以实现旋转式运动。电子换向则需要三相半桥式功率开关轮流导通和截止。为了实现在一个方向上产生转矩,换向是由转子的位置决定的。ML4425中的电子换向是按恰当的时序,通过接通和关断一相中的N输出和另一相的P输出来完成的。 N沟道管输出和P沟道管输出,共有6个组合(6种开关状态),它们构成了一个完整的换向循环周期。这6种组合在图6和表2中予以说明,并用状态A、B、C、D、E、F分别作标记。该时序已编程在换向状态机器中。换向状态机器的时钟脉冲是由VCO压控振荡器来提供的。
图6 输出换向时序的定时波形 (循环周期1:完整的换向;循环周期2:按50%PWM占空比换向) 表2 ML4425的6种换向状态功能
关键词:三相直流无刷电机;无传感器;反电势取样器;锁相环
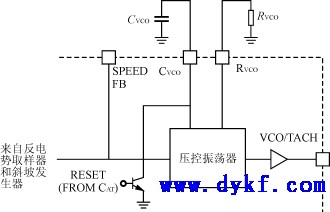
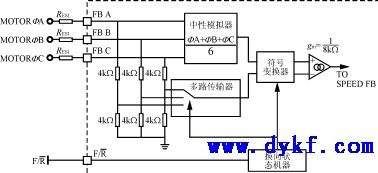
压控振荡器在VCO/TACH脚提供一个TTL兼容的时钟输出,它与SPEEDFB脚的VCO输入电压成比例。VCO频率与电压之间的比例常数KV,是由图5中接RVCO脚的80.6kΩ电阻器和接CVCO脚的一只电容器来设定的。RVCO设置的电流与SPEEDFB端的VCO输入电压成比例。该电流用于在2.3V~4.3V范围内对CVCO充电和放电,如图7所示。 在CVCO脚产生的三角波对应于VCO上的时钟脉冲。比例常数KV应当这样设定,即当VCO输入等于或稍小于VREF时,VCO输出频率对应于最大的换向频率或最大电机速度。CVCO可用式(2)计算 CVCO=(2) 并选用等于或小于计算值的最接近标准参数的电容。 VCO脚上的最大频率由式(3)求出 fMAX=0.05×N×RPMMAX(3) VCO/TACH脚的电压等于转子的速度。SPEEDFB脚的电压由反向电势取样器控制。 37反电势取样器 压控振荡器的输入端是反电势取样器。输入到反电势取样器的反电势传感脚FBA、FBB和FBC,需要一个电机相位引线的信号,它低于ML4425的电源电压VDD值。相位传感的输入阻抗是8kΩ。这就需要一只电阻RES1串联在电机相位引线,见图8,它可由式(4)求得 RES1=(670Ω/V)×(VMOTOR-10V)(4)
无传感器的直流无刷电机控制器ML4425及其应用(2)
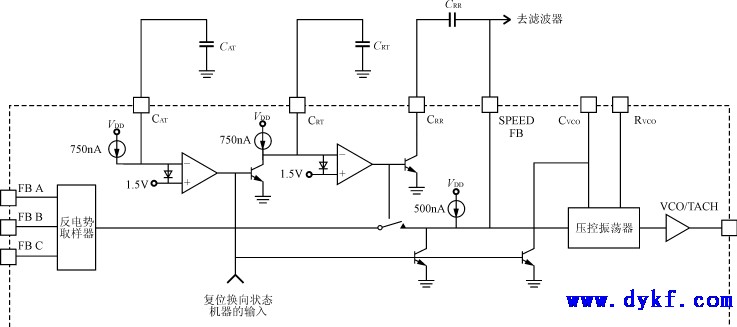
这就使ML4425能够比较反电势对电机中性点的信号而无须从Y形绕组的电机引出一根线。对于三角形绕组的电机不存在物理的中性点,所以该参考基准点应能在任何情况下来计算。 反电势取样器测量电机的相位,是没有驱动时的相位。也就是说如果LA和HB均导通,那么相位A被驱动为低电平,相位B被驱动成高电平,而相位C则被取样。已取样的相位提供一个反电势信号,它对照比较电机的中性点。 取样器由换向状态机器控制。已取样的反电势信号,经一个误差放大器与中性点相比较。误差放大器的输出端,则向SPEEDFB脚输出充电电流或放电电流,使它向VCO提供控制电压。 38反电势传感的锁相环换向控制 由换相状态机器、压控振荡器和反电势取样器三个单元组成一个锁相环路,它跟踪在反电势信号上的换向时钟脉冲。完整的锁相环路方框见图9。锁相环路需要一个导引滞后滤波器,它由SPEEDFB脚外部元件来设置。这些元件可由式(6)、式(7)、式(8)计算CSPEEDFB1=0.25××(6)RSPEEDFB=2×M×ln×(7) CSPEEDFB2=CSPEEDFB1×(M-1)(8) 39起动时序 当电源最先加到ML4425电动机处于静止状态时,反电势等于零。电机需要旋转,使反电势取样器锁定在转子位置,并且使电动机换向。ML4425采用开环起动技术,使转子从静止到足够快的速度,从而使能够传感反电势。起动由三个状态组成:校准状态,斜升状态和转动状态。 1)校准状态(复位) 在电机可以起动之前,转子必须处在已知位置。当电源最先加到ML4425时,控制器被复位到校准状态。校准状态使输出驱动器LB、HA、HC导通,在第一个换向状态进入中心位置之前,把电机校准到电气30°位置上。这就是表2中换向状态里的R状态。校准状态必须有足够长的持续时间,使电机及其负载稳定在该位置上。 校准状态时间是由接CAT脚的电容来设定的,见图10。CAT由恒流750μA充电,使CAT脚电压从0V升到15V,直到校准比较器关闭结束校准状态。CAT的起始点数值按式(9)计算 CAT=(9) 如果校准时间不够长,无法满足转子可靠的起动,那么应增大CAT值,直到满足希望的性能为止。 2)斜升状态 当校准状态结束时,控制器进入斜升状态。斜升状态按表2所列从状态A到F开始换向,从而在一个固定的时间段里使换向频率以及电机的转速呈直线上升。这就使电机达到一个足够高的转速,使反电势取样器跟踪换向到电机的反电势上。 ML4425停留在斜升状态的时间,由接CRT脚的电容器来确定,见图10。CRT由恒流750μA充电,使CRT脚电压从0V升到15V,直到斜升比较器关闭结束斜升状态。这就给出了一个固定的斜升时间。CRT由式(10)计算
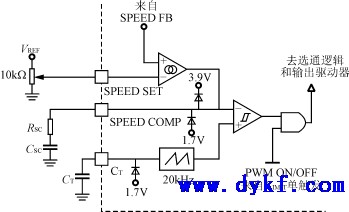
3)转动状态(反电势传感) 当斜升状态结束时,控制器进入转动状态。在转动状态中,反电势传感有效,并且换向已处在锁相环的控制下。电机的速度现由速度控制环调节。 310PWM速度控制 速度控制由SPEEDSET端设置的一个速度指令来完成,该脚输入电压为0~6.9V(VREF)。速度指令的精确度由外部元件RVCO和CVCO确定。有几种方法可用于控制ML4425的速度指令。一种方法是用一只10kΩ电位器接于脚VREF和地端之间,其中心可调端则接SPEEDSET。如果SPEEDSET由微处理器控制,那么其数-模转换器DAC可用VREF作为它的输入参考基准,见图11。 通过一个跨导误差放大器,将速度指令与从SPEEDFB来的传感速度作比较。速度误差放大器的输出是SPEEDCOMP。该SPEEDCOMP脚被箝位在两个电压之间:一是高于39V的一个二极管压降(约46V)上,另一是低于17V的一个二极管压降(约10V)上,以防止速度环路“卷紧(windup)”。速度环的补偿元件接该脚,见图11。速度环的补偿元件由式(11)、式(12)计算 CSC=(11) RSE=(12) 式中:fSB是速度环路的频带宽度(Hz)。 将SPEEDCOMP脚上的电压与斜升振荡器进行比较,可产生一个PWM占空比。脉宽调制的斜升振荡器产生一个17V~39V的锯齿波函数,见图11。在加电时一个低于17V的二极管压降(约10V)作为负极性箝位起动振荡器。斜坡振荡器的频率由一只接地电容器CIOS设定,可用式(13)选用 CT=(13) 式中:fPWM是PWM的频率(Hz)。 来自速度控制环的PWM占空比开启电流限制一次起动,以控制LA、LB和LC输出驱动器。 311交叉传导比较器 当ML4425从校准状态进入斜升状态时,在三相桥式功率级存在着交叉传导的可能性。这种交叉传导会发生在HC导通的校准状态,也就是表2中的R状态,以及发生在控制器转变到状态A的斜升状态,此时HC关断而LC则导通。由于功率器件的导通时间和截止时间存在差异,也会引起交叉传导。为了解决这个问题,LC输出驱动器被迫关断,直到HC等于VDD-3V为止,如图12所示。 312制动刹车 当脚BRAKE被拉低到小于14V时,低边输出驱动器LA、LB、LC均导通,而高边输出驱动器HA、 无传感器的直流无刷电机控制器ML4425及其应用(2)
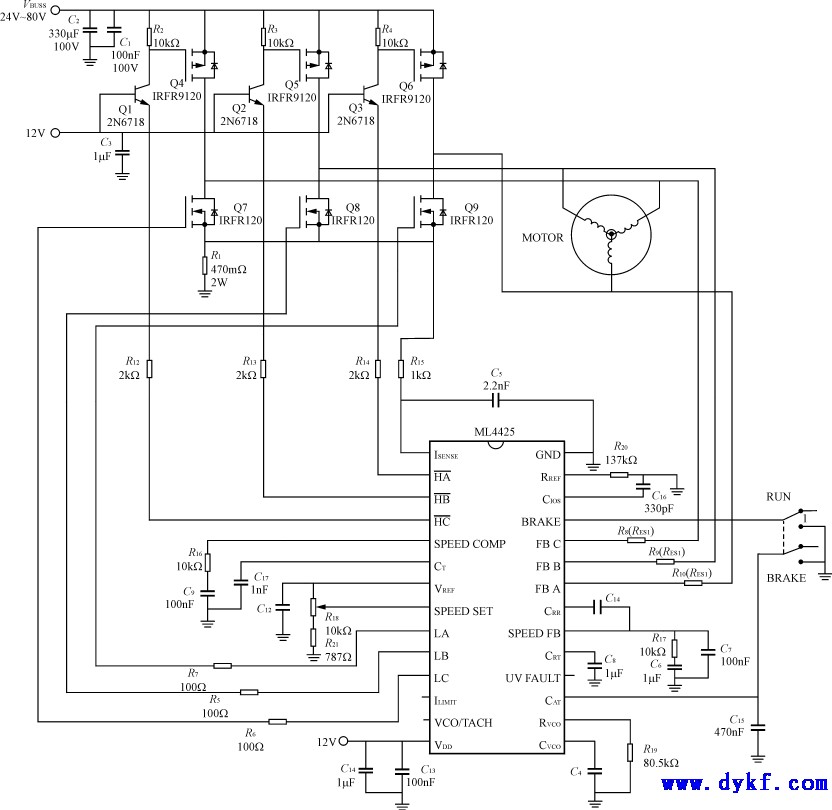
313欠压锁定 欠压锁定用于在低VDD条件下保护三相桥式功率级。当VDD为95V或更低时,欠压锁定功能被触发,并由脚UVFAULT上的TTL低输出来指示。欠压锁定也会关断所有的输出驱动器LA、LB、LC和HA、HB、HC。触发欠压锁定的比较器有150mV滞后。 4设计依据三相桥式功率级的接口技术 ML4425输出驱动器可驱动一个三相桥式功率级。为应用在母线电压12V~80V范围,可采用电平位移电路来驱动作为高边开关的较高电压的P沟道型MOSFET功率管,如图13所示。 最灵活的电路结构是用高边驱动器来控制N沟道型MOSFET或者IGBT,它允许应用在从低于12V、一直升高到600V高压,图14给出了ML4425与 IR2118高边驱动器之间的接口电路。该电路能驱动母线电压高达320V的电动机。用一个RC电路可使制动脚BRAKE在起动之前受脉冲作用。这能对三路高边驱动器的自举电容器C19、C20、C21进行充电,让复位相位正常地工作。 这些电容器的容量应使之在校准状态期间有足够的充电时间。 应用电路图13中外部互补管极限参数:P沟道IRFR9120反压-100V、电流-3.6A;N沟道IRFR120反压100V、电流58A(100℃)。应用电路图14中的MOSFET管IRF720:反向击穿电压400V、漏源电流26A(100℃)。 您打印的此文来自: |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 作者:刘胜利 刘… 来源:电源技术应用0208 点击数: | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

 - -
|
【字体:小 大】 |